2018年12月8日土曜日
2018.12.08 アップデート版アルファ1ブラストで自分で対象物を限定し補正しブラスト処理を完了
アルファ1ブラストにとっては小さい対象物は形状把握が苦手なのだが、全く問題ないレベルである。
また、
1パスのみの低圧ブラスト0.7Mpa No.5ノズル GRH-7である。
 |
| クランプ跡とブラスト直後のタイムディレイが右下側の残し |
 |
| オーバーラップは50-100mmで指示した 両サイドはブラスト指定していない。(見えない位置) |
3d図面をアルファ1ブラストに教えた場合は精度が上がり完璧なブラストを行えるようになった。いずれも1パスのみという事に注目していただきたい。
作業者なら必ず2-10パスほど無駄に往復ブラストを行い表面のプロファイルを破壊してしまう。当然だが無理なのである。こんな小さい対象物だけでなく1日100-200m2もブラストした場合、かなりの効率が無駄になる。


2018年11月30日金曜日
アルファ1ブラストが自分で対象物をサーチしブラストし始める2018.11.29
新しい、プログラムをインストールした結果
アルファ1ブラストロボットは自分で対象物を限定しブラスト計画を始めた。
対象物は筆者である”私”の体である。
初めに、ポーズをとったとき腕を上げたがやっぱり腰に当てなおしたら
両方マッピングされていた。
サーチ時間は1分
自己タスクジェネレート時間 4-5分
ブラスト時間約30分
アルファ1ブラストロボットは自分で対象物を限定しブラスト計画を始めた。
対象物は筆者である”私”の体である。
初めに、ポーズをとったとき腕を上げたがやっぱり腰に当てなおしたら
両方マッピングされていた。
サーチ時間は1分
自己タスクジェネレート時間 4-5分
ブラスト時間約30分
2018年11月16日金曜日
アルティメットバルブの装着
アルファ1ブラストロボットに連動させて完全なる無人型ブラスト処理が完成した。
このバルブはフィードバック制御にて研削材の吐出量を測定しながら調整するためミスが起きない。モーターなど一切、使用しないため機械的故障は起きない。全ての履歴は保存される。現在はGRH-7で0-15kg/分を0.1kg単位で制御している。







2018年11月12日月曜日





2018年11月9日金曜日
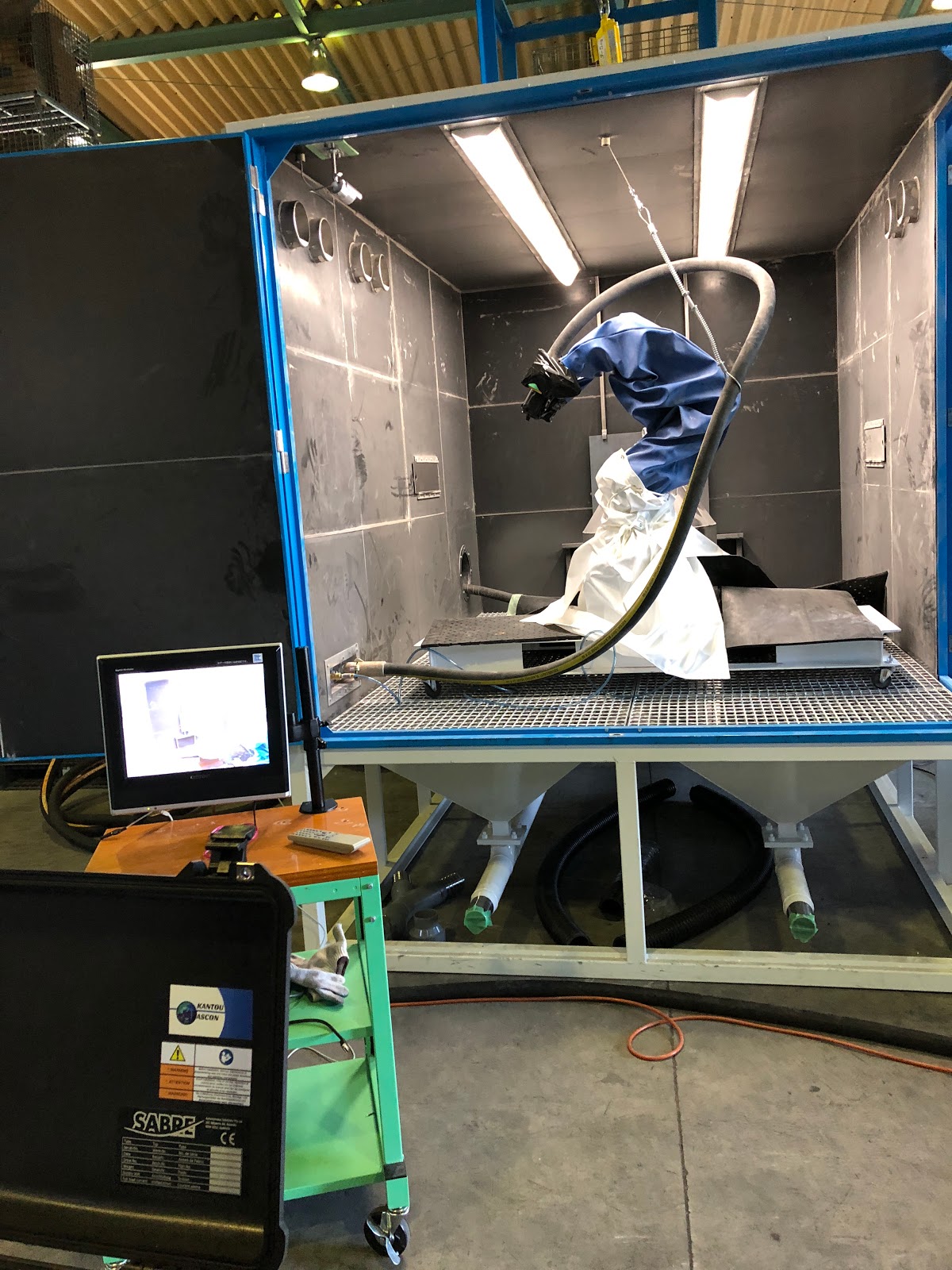
ブラストルーム内カメラキャプチャー ホース位置変更
一般的な元圧0.7Mpaの低圧ブラストによるタスク動作確認ブラスト
ブラストノズルΦ6.5mm 自動生成
600-1000mmスタンドオフ
200mm/sノズル移動速度
ピッチ25mm
2018年11月8日木曜日
ゼロ補正
再来週から、シドニーのセーバー社に単独でK君に行ってもらうのだが、今回の派遣でほぼ全てを網羅出来るようになる予定である。
木更津の方は、すでに国際水準的にはかなり高度な状態まで到達しているので最後の押しである。
前回、ロボットアームがワイヤーに絡まりサーボずれを起こしたので補正を独自で行った。取説指導書はないが自力で回復した。
ゼロイングも自力で行い復帰した。
ズレが酷い



木更津の方は、すでに国際水準的にはかなり高度な状態まで到達しているので最後の押しである。
前回、ロボットアームがワイヤーに絡まりサーボずれを起こしたので補正を独自で行った。取説指導書はないが自力で回復した。
ゼロイングも自力で行い復帰した。
 |
| 自作のレーザーポインターノズルスポットを使いブラストポイントも補正していく |
回復した。次回からはすぐに復帰できる



2018年11月3日土曜日
2018.11.05 近い将来の為のAIブラスト化の研究
誰もがご存知の通り、ブラスト処理ほどロボット処理に向いているにもかかわらずロボット化されていないものは無かった。特に構造物や少品種に対する面相臭い点だけに集中した理由だ。ブラスト処理自体は圧倒的に人の作業は信頼性がない事は明白である。真っ暗闇の中で有害粉塵物の濃度が基準値の5000倍の中の換気のできない容器の中で人が完ぺきなSa3ができるのか?当然酸化防止のために環境は窒素100%の中での作業だ。できるわけがない。遅かれ早かれ人の作業でなくなることは明白だ。海外でも今同時に進んでいる。(株)関東アスコンも同時に進んでいる。









2018年10月21日日曜日
2018.10.21 年内のアルファ1ブラストロボットへの試み 3Dデータの写真からの抽出
現在、DWG形式の3Dデータがあれば、アルファ1ブラストロボットが自動的にオブジェクトを実際の位置を特定し自分でAIがブラスト計画をおこない、タスクを自動生成するところまでは確認した。当然ブラストの素地調整もSa1-3までの数値制御が可能なことも確認した。次は3Dプリンター用のソフトを使い写真から3Dデータを起こしアルファ1ブラストロボットに入れ込めば、真の意味の「誰でもできる」というコンセプト通りになる。
写真データから3Dデータ
写真データから3Dデータ
 |
| フリーのバイクのデータ2/3スケールに対してブラスト処理を行っている |
3Dデータが無くても写真、動画から創生できれば、アルファ1ブラストロボットの方と連動させることにより現場にいなくても勝手にブラスト処理が可能となる。
2018年10月13日土曜日
2018.10.13 国内初のアルファ1ブラストロボットのAI制御によるフルパワーブラスト処理
タスク計画は全てアルファ1ブラストロボットに自動生成させている。我々の方では、距離、角度、移動速度、停止時間すらも全く補正していない。今回は作業者の限界設定であるBP-600を使用してノズル先端圧1.0MPa(元圧1.2MPa),ノズル内径φ12mmブラストホース内径φ32mm:10mで18-1.8-3mの超小型ブラストルーム内にてガーネット#80:高圧洗浄機用をフルパワーでブラストした。
*見どころ
まず、ノズルを移動するアームが壁ギリギリでも当たることなくすれすれで軌道計算しているところが見れる。
強烈な衝撃力により、ガーネットの中で最も硬く割れにくい#80オーストラリアガーネットでさえ、粉砕されて粉塵と化している。
部屋の集塵はほぼ直結で3.7kw 60m3 250mmダクトの集塵機を設置しているため、換気回数は1分間に6回転もさせている。通常のブラストルームの12倍の換気回数にもかかわらずこの粉塵発生量がブラストのパワーの凄さを証明している。真空回収用には更に22kwルーツブロアーを用意しているが、この時点では停止させている。
自動生成プログラムが自己判断でノズルの移動時にブラスト停止にするかブラスト噴射し続けるかは決めているのだが、途中移動しながら停止しているときはすぐさま粉塵が消えていることから集塵の強さも証明されている。
(参考動画 低圧でのテスト風景)
(参考動画 円錐コーン シュミレーション キャプチャ―)
すでに、アルファ1ブラストロボットのために私達がお手伝いしている状況で今まで体験したことが無い奇妙な感覚になった。
このような狭い部屋でハイパワーなテストをブラスト作業者にさせると大抵は嫌がるし、視界が悪いためブラストの打ち方が乱雑になり表面処理の素地調整状態が安定しない。なので、ブラスト作業者のご機嫌を損なわないようにしなければならない。
しかし、アルファ1ブラストロボットの場合はブラスト処理の計画から方法、処理条件までシュミレートとして記録までしてくれる。一台で5人くらいの活躍をしてくれるので当然すでに人間よりも上になってしまった。少なくとも私はそう思ったので、テスト終了時に掃除くらいはさせてもらった。その、掃除自体の方が時間が、かかってしまったのでアルファ1ブラストロボットに、次回までに部屋の中をエアーブローしながらみずから掃除するタスクを自動作成してもらい、私は何もしないことにするつもりだ。
もの凄く仕事のできる優秀なアルファ1ブラストロボットのおかげで毎回、(株)関東アスコン・木更津でテストするのが楽しみでしょうがない。
次回は、GRH7-10によるスチールグリッドを自動連続噴射ユニットを使用して連続運転のテストを行う。完全なる無人化となる。研削材の自動選別供給ユニットも10月までには揃うので、組み合わせにより6通りの使い方ができるようになる。更にブラスト機も何パターンか用意すするので国内・外で行うほぼすべてのブラストテストは可能となる。
*見どころ
まず、ノズルを移動するアームが壁ギリギリでも当たることなくすれすれで軌道計算しているところが見れる。
強烈な衝撃力により、ガーネットの中で最も硬く割れにくい#80オーストラリアガーネットでさえ、粉砕されて粉塵と化している。
自動生成プログラムが自己判断でノズルの移動時にブラスト停止にするかブラスト噴射し続けるかは決めているのだが、途中移動しながら停止しているときはすぐさま粉塵が消えていることから集塵の強さも証明されている。
(参考動画 低圧でのテスト風景)
(参考動画 円錐コーン シュミレーション キャプチャ―)
すでに、アルファ1ブラストロボットのために私達がお手伝いしている状況で今まで体験したことが無い奇妙な感覚になった。
このような狭い部屋でハイパワーなテストをブラスト作業者にさせると大抵は嫌がるし、視界が悪いためブラストの打ち方が乱雑になり表面処理の素地調整状態が安定しない。なので、ブラスト作業者のご機嫌を損なわないようにしなければならない。
しかし、アルファ1ブラストロボットの場合はブラスト処理の計画から方法、処理条件までシュミレートとして記録までしてくれる。一台で5人くらいの活躍をしてくれるので当然すでに人間よりも上になってしまった。少なくとも私はそう思ったので、テスト終了時に掃除くらいはさせてもらった。その、掃除自体の方が時間が、かかってしまったのでアルファ1ブラストロボットに、次回までに部屋の中をエアーブローしながらみずから掃除するタスクを自動作成してもらい、私は何もしないことにするつもりだ。
もの凄く仕事のできる優秀なアルファ1ブラストロボットのおかげで毎回、(株)関東アスコン・木更津でテストするのが楽しみでしょうがない。
次回は、GRH7-10によるスチールグリッドを自動連続噴射ユニットを使用して連続運転のテストを行う。完全なる無人化となる。研削材の自動選別供給ユニットも10月までには揃うので、組み合わせにより6通りの使い方ができるようになる。更にブラスト機も何パターンか用意すするので国内・外で行うほぼすべてのブラストテストは可能となる。
2018年10月6日土曜日
2018.09.28 アルファ1ブラストロボット 日本初ブラスト処理動画
日本初の自律型ロボット:アルファ1ブラストロボットによるブラスト処理を行った。
現時点でセーバー社からの試運転は未実施の状態で、且つシーケンサーすら組んだ経験が無くてもここまで高度なロボット制御をわずか開封から20時間程度で行えるのは驚いた。勝手に制御装置側で複雑な軌道プログラムをジェネレートしてくれることの証明である。このテストピースは円錐コーン型で一見簡単そうに見えるが難しい。アームが移動したときの対象オブジェクトととの距離を計算するには「目」が無ければ精度が出ない。
今回の動画は、この間にテストピースを一度移動しているのだがうまくいってる。
ブラストホースを高圧用:内径φ32用の100Hpコンプレッサー対応の太いブラストホースを接続させているためホースのセッテイングは吊り金具を使うかして捌きを手伝ってやる方がいいのと、今回即興でその辺に転がっているゴムシートを載せたがきちんとカバーを製作した方がよさそうだ。少しでも摩耗するのが嫌だったので養生テープを張りまくったらみすぼらしくなってしまったが、この辺も一考していかなければならない。
今回は初めてだったので、BP110と低圧0.6MPa及びノズルSN156-450(Φ6.5mm)の組み合わせで
ガーネットを使用したが、次回は高圧1.0MPa及びノズルSN156-650(φ9.5mm)でブラストのテストを行う。
動画でも、ご覧になってわかる通りこのテストピースみたいなものが10個程度の場合は従来なら人がブラストするのが当たり前だったのである、当然コストから考えればである。この形状で3倍の大きさの場合だった場合更に、人がやらざるを得なかった。
もし、今後、
国内内でブラストルームのような閉鎖空間で粉塵発生源の近傍で作業者がどんな防塵服・防塵マスクを着用しても安全衛生法的に許可されない事態となった場合どうするのか?
このような、対象物の放射能の除染を行うときにこの放射能混じりの粉塵の中で果たして作業は可能なのか?そもそも、一般的に世界中の人々は暑苦しい防護服と防塵マスクを着用してうす暗いブラストルームや貧弱な足場、安定しないスカイマスターに乗ってブラストする事が良い仕事と思えるのか?
私自身、大学卒業して技術屋として32年間やってきた中で、今回のこのアルファ1ブラストロボット以外で未来に続くなぁと思ったブラスト機器など見たことが無かったし体験したことも無かった。
今後、先進国においては更にAI技術は、この手のロボットを含めて進化していくだろうからもっと使いやすくなることが明白であり、時期にブラスト作業者というのは存在しなくなり、ブラスト処理を研究するために手打ちブラスト装置が残るであろう。また、発展途上国においては、手打ちのブラスト作業者というものは温存され、発展途上国へ出稼ぎに来る事にもつながるだろう。しかし、危険手当という概念がAI型ロボットには存在しないため、現行の低コストのまま作業者ブラストが残り、精度の低いブラスト処理という新たな規格が生まれてくる必要性がある。
少なくとも、私自身は今までもそうだったが、今後もブラスト機器を販売する立場でありながら、二度と自分自身でブラストラスノズルを手に持ち、防塵面を被って防護服を着用してブラストする事はしない宣言をする。
2018年9月29日土曜日
2018.09.28 アルファ1ブラストロボット 実機 狭いブラストルーム内 ホース ブラストSW 動画
ようやく、ブラストルーム内でのアルファ1ブラストロボットのセッテイングが終了した。最終確認事項は
・ブラストホース、継手、ブラストノズルなどを固定し、遊びをなくす事による
捻じれ負荷に各関節軸が絶えれるかどうか?
・ブラストホース捻じれをアルファ1ブラストロボット側が自分でよじれ補正をしてい
るか?
・アルファ1ブラストロボットのシュミレーターどおりSCUユニットが外部ブラストリ
モコンSWへ信号受け渡しができてるか?
以上が問題ない事を確認できたので、いよいよ来週はブラスト処理を開始できる。
・ブラストホース、継手、ブラストノズルなどを固定し、遊びをなくす事による
捻じれ負荷に各関節軸が絶えれるかどうか?
・ブラストホース捻じれをアルファ1ブラストロボット側が自分でよじれ補正をしてい
るか?
・アルファ1ブラストロボットのシュミレーターどおりSCUユニットが外部ブラストリ
モコンSWへ信号受け渡しができてるか?
以上が問題ない事を確認できたので、いよいよ来週はブラスト処理を開始できる。
2018.09.27 アルファ1ブラストロボット 実機によるタスク確認 狭いブラストルーム内 動画
今までオープンスペースでの動作確認をしてきたが、今回は狭い範囲:小型ブラストルーム 2-2-2-mの範囲で壁に衝突せずにアルファ1ブラストロボットが稼働するかどうか?の最終確認をした。センサーでのマッピング作成の際、アームが大振りするためである。特に厳密にアルファ1ブラストロボットの置き場所を設定したのではなくだいたいの目測で置いて実機シュミレーターで確認後、ブラスト(ブラスト機は繋げていない)を開始した。
2018年9月28日金曜日
2018.09.27 アルファ1ブラストロボット 実機によるタスク確認 オープンスペース 動画 ノーカット
アルファ1ブラストロボットのAIがジェネレートしたタスクで全く人が手を出さずに完成。約40分で自動作成。この動画見るとわかるが、とても人が計算して動作プログラムを組める内容では無い。下のバルブの奥をブラストするために20mmくらいの隙間を避けながら進行する。これで前面部は完璧にブラストが終了した。
2018年9月27日木曜日














2018年9月26日水曜日
2018.09.26 (株)関東アスコンにてアルファ1ブラストロボットのタスクを自作試作した。
だいたいタスク自体は3D図面を投入後、簡単なブラストパターンの場合、こちらが作るのではなくシュミレーター側が自分で創生してくれるのでパソコンの能力により時間は決まるが20分以内に自動的にプログラムが出来上がる。パソコンオペレーターが複数人いればタスク作成は分業化できる。もう、すでにブラストの作業は人がやる時代の終焉がようやく見えてきた。ブラストのきめ細かな設定調整を解読するには時間の問題だと思う。
下記の物は自動生成させてみた。
実在する関東アスコンの製品:ブラストタンク BP600でタスクを作成した。
実在しないバイクの2/3模型でタスクを作成した
2018年9月22日土曜日
2018.09.22 デモンストレーション及びセーバーからの最新動画
高度な天井吊りXY軸制御技術をコラボするために来社してもらい実機デモを行った。
うまくいけば、ようやく世界に先陣を切ることが可能となる。セーバー社からの返答速度が1時間以内になっていることから我々への期待度が解る。
動画は最新動画である。
2018年9月19日水曜日
アルファ1ブラストロボット 計画方法 7
本日はかなり手ごたえがあった。
アルファ1ブラストロボットについて日本で一番理解しているのは当然、当たり前だが私達だがかなり理解が進んだ。スキャンとマッピング後、タスクが実行されるときにおいて、今までエラー発生率が高かったのだが発生率を極端に下げる方法と、実際の対象物とブラストの走査軌跡を合致精度を上げる事にも成功した。
次回は小型ブラストルーム内でのブラストができるかどうかのテストを行いたい。
屋外や広い範囲でのオープンスペースでのブラスト計画は容易であることはわかった。
次回は小型ブラストルーム内でのブラストができるかどうかのテストを行いたい。
屋外や広い範囲でのオープンスペースでのブラスト計画は容易であることはわかった。
2018年9月17日月曜日
アルファ1ブラストロボット 計画方法 6 (番外編)
通常の業務用、事務処理やインターネットやるためのパソコンと今回のようなロボットを動かすためのシュミレーター用のパソコンを同じパソコンでやろうとすると無理がある。以前から自分で作ってみたいとは思っていたが、面倒臭いのでやらなかった。私にような、年に何回も買い替える者は自作の方が良かったと思う。今回やってみて思ったが、案外簡単で親切にネットで組み方を教示してくれておりエラーが出ても対策を教示してくれる人がたくさんいるので安心である。問題なのは、取説の字が小さいのと部品が小さいので眼鏡を老眼などに切り替えるのが煩わしく、息子に手伝ってもらった。専門知識は彼らの方が圧倒的に詳しい。私は電源や配線などのハード系の意味がわかるためサクサク進み3-4時間くらいで完成した。ついでに古いパソコンのグラフィックボードも交換しといたら古いパソコンのうなり音が消えた。かなりCPUに負担がかかっていたのだと思う。
ウインドウズ10のインストールに関しては、何回かエラーが出て困ったが、グラフィックボードを外すのと、SSDドライブの領域を解放することで解決した。プロダクトキーを購入して無事動作も確認できた。結果、かつてないほどのスピードマシンが完成した。
市販のパソコンには関係ないソフトがうじゃうじゃ付いてるのと、やはり部品に妥協して製作販売しているため能力が平均的になる。今回のようにロボット装置の一部としてとらえる場合は妥協できないため、思う存分高スペックにすることができる。また、1-2年でCPUなどが新しい製品が出た場合は、パーツを交換していった方が効率が良くゴミが増えない。自作パソコンは巨大になるため置き場所は少し困るが、内容に関しては自分が組んでるので理解しているため交換は簡単である。

 |
| 見る人が見れば一目瞭然のゲーミングパソコンの仕様である、今後オーストラリアと交信する場合もあるのでリアルタイムに動作するようにしてある。シュミレーターのプログラム自動生成時間の短縮と、シュミレーションの動画精度を出すためには必要だ。 |

 |
| 筐体はできるだけ大きいのを選択した、後で増設する際に困らないためと、熱対策である。 |
 |
| 配置は適当に重量が下部になるようにした。 電源は800Wの大型電源を搭載した。 |
 |
| 冷却ファンは大型2個にグラボに2個搭載されている。前回、オーバーヒートでフリーズしてしまった為の対策だ。 |

2018年9月9日日曜日
アルファ1ブラストロボット 計画方法 5 (番外編)
少し話はずれるが、
アルファ1ブラストロボットのシュミレーターの推奨仕様は
OS windows 10
CPU intel core i7~
メモリー 8GB以上
グラフィックボード GTX1050以上
実機端末

実機の方に搭載されているCPUはintel corei7 2.5GHZクラスなのでそこそこなのだが、シュミレーションで様々なテスト計画を行っていると、使用しているパソコンの能力によりタスク内容に変化があるときがある。少なくとも実機以下のスペックのパソコンを使うことは厳禁である。OS自体はwindows10上で動作しているので扱いやすい。
今回のために、パソコンは用意しているのだが、シュミレーターを起動して様々なブラスト処理計画を仮想空間上で行うに際して、グラフィックボードの性能が良いほうがうまくいく。いわゆるゲーミングパソコンと呼称される類の方が結果が出るのが早い。
一度、タスクと「ブラストの計画」が終了すれば後は問題無いのだが、「ブラストの計画」という段階で演算処理をしながら最適な方法をシュミレーター側が検討し、プログラムを生成するのだが、パソコンの性能により2-3倍の差が出る。
上記のような楕円球体においてシュミレーションを行うとintel core i5とi7:第8世代ではかなりの時間差が生じる。また、あまりに演算に時間をかけているとフリーズしたのかと思う事もあるのでシュミレーションの段階で不要な待ち時間を掛けることほど無駄なことは無いのでできるだけ時世に合わせた最新のパソコンを用意する必要があるため追々、自作パソコンを用意する事にする。
このように、我々のブラストの仕事内容もがらりと変わってしまった。
レベルは低いがIT系と言えばそうなるだろう。
毎日、シドニーのPh.D.ステファンとやり取りしながらタスクの修正とテストをシュミレーターで行い、実機に搭載しズレなどを補正し、確認しながらアルファ1ブラストロボットを理解していくことを現在行っている。関東アスコンは全員で5名だが、理工系出進の技術者は私しか居ない、しかし、実際にタスクを弄くりまわし、Ph.D.ステファンと交信しているのは私ではない。私はあくまでも総監督をしているだけである。ここが、このアルファ1ブラストロボットのすごいところである。まだ延べ10時間ほどしか費やしていないのにすでに私の27年分の装置に関するを解決策を超えてしまった。
****************************************
シドニーのセーバー社に行ったときに彼らが
「ブラストの仕事は事務所や出張先のホテルで行うことができるようになった。メールさえ受け取れる環境なら世界中どこでもタスクを受け取れるし、その会社の人がタスクを作る必要もない。極めて効率的だ。」と言っていた。確かに理想でありその通りである。
よく存在する「そんなの、作業者の方が早いから要らないし、やらない」という人たちがいるがそれは、そのままでいい。少なくとも、私自身28年近くこの世界でやってきてショツトピーニングから屋外ブラストまで国内外見てきて、数えきれないくらいの装置を納入した中で全部において腑に落ちない点があった。ショツトピーニング装置の設計における汎用性の無さに加え電気屋さんの装置動作へのウエイトの高さ、何かあれば自己解決のできない汎用シーケンサーの採用及び次計画の段取りの遅さ。汎用型多軸ロボットに関しては原点の喪失により振り出しに戻る、XYZ軸テーブルのシーケンス制御より質が悪い。屋外ブラスト及び屋内ブラストルームブラストにおいては、なぜこのブラスト処理は人がやっているのだろう?そしてなんでこんなに時間がかかるのだろう。作業者は肩が痛くなるから天井面はやりたがらないし、防塵面、高所安全帯をしながらのブラストやバキュームブラストなどは1週間以上はかなりしんどい作業だ。閉所暗所空間は作業的に危険で粉塵も有害だ。自動送りインペラー式ショツトブラストマシーンに関しては、作業者が直接ブラスト処理しないのは良いのだが設備がとにかく、大型になり装置コストも場所もお金がかかり且つ、ブラスト処理に肝心な表面粗さ(表面粗度、鋭角でフラクタルでなければならない)が得にくいため、次工程の塗料などの密着度が得にくい。簡単に要約すると再ブラスト処理が必要な場合がある。
その、腑に落ちない原点の全てが「人」であった。他の業界でもいえる事であろうが、差ブラストノズルを持つのは「人」でなくてもいいのではないか?シーケンスプログラムを考えるのは「人」でなくてもいいのではないか?多軸ロボットのアームとホースの捻じれによる逆転のプログラムを考えるのも、ブラスト処理のパターン計画を考えるのも「人」でなくてもいいのではないか?上記について考えるのも面倒臭くなって諦めて、忘れていたところに、このアルファ1ブラストロボットが現れたために我々、関東アスコンに新しい仕事ができた。完全に違う仕事なのだが、今までのブラストの経験の蓄積が役に立つのでようやく光が差した。
アルファ1ブラストロボットのシュミレーターの推奨仕様は
OS windows 10
CPU intel core i7~
メモリー 8GB以上
グラフィックボード GTX1050以上
実機端末

実機の方に搭載されているCPUはintel corei7 2.5GHZクラスなのでそこそこなのだが、シュミレーションで様々なテスト計画を行っていると、使用しているパソコンの能力によりタスク内容に変化があるときがある。少なくとも実機以下のスペックのパソコンを使うことは厳禁である。OS自体はwindows10上で動作しているので扱いやすい。
今回のために、パソコンは用意しているのだが、シュミレーターを起動して様々なブラスト処理計画を仮想空間上で行うに際して、グラフィックボードの性能が良いほうがうまくいく。いわゆるゲーミングパソコンと呼称される類の方が結果が出るのが早い。
上記のような楕円球体においてシュミレーションを行うとintel core i5とi7:第8世代ではかなりの時間差が生じる。また、あまりに演算に時間をかけているとフリーズしたのかと思う事もあるのでシュミレーションの段階で不要な待ち時間を掛けることほど無駄なことは無いのでできるだけ時世に合わせた最新のパソコンを用意する必要があるため追々、自作パソコンを用意する事にする。
このように、我々のブラストの仕事内容もがらりと変わってしまった。
レベルは低いがIT系と言えばそうなるだろう。
毎日、シドニーのPh.D.ステファンとやり取りしながらタスクの修正とテストをシュミレーターで行い、実機に搭載しズレなどを補正し、確認しながらアルファ1ブラストロボットを理解していくことを現在行っている。関東アスコンは全員で5名だが、理工系出進の技術者は私しか居ない、しかし、実際にタスクを弄くりまわし、Ph.D.ステファンと交信しているのは私ではない。私はあくまでも総監督をしているだけである。ここが、このアルファ1ブラストロボットのすごいところである。まだ延べ10時間ほどしか費やしていないのにすでに私の27年分の装置に関するを解決策を超えてしまった。
****************************************
シドニーのセーバー社に行ったときに彼らが
「ブラストの仕事は事務所や出張先のホテルで行うことができるようになった。メールさえ受け取れる環境なら世界中どこでもタスクを受け取れるし、その会社の人がタスクを作る必要もない。極めて効率的だ。」と言っていた。確かに理想でありその通りである。
よく存在する「そんなの、作業者の方が早いから要らないし、やらない」という人たちがいるがそれは、そのままでいい。少なくとも、私自身28年近くこの世界でやってきてショツトピーニングから屋外ブラストまで国内外見てきて、数えきれないくらいの装置を納入した中で全部において腑に落ちない点があった。ショツトピーニング装置の設計における汎用性の無さに加え電気屋さんの装置動作へのウエイトの高さ、何かあれば自己解決のできない汎用シーケンサーの採用及び次計画の段取りの遅さ。汎用型多軸ロボットに関しては原点の喪失により振り出しに戻る、XYZ軸テーブルのシーケンス制御より質が悪い。屋外ブラスト及び屋内ブラストルームブラストにおいては、なぜこのブラスト処理は人がやっているのだろう?そしてなんでこんなに時間がかかるのだろう。作業者は肩が痛くなるから天井面はやりたがらないし、防塵面、高所安全帯をしながらのブラストやバキュームブラストなどは1週間以上はかなりしんどい作業だ。閉所暗所空間は作業的に危険で粉塵も有害だ。自動送りインペラー式ショツトブラストマシーンに関しては、作業者が直接ブラスト処理しないのは良いのだが設備がとにかく、大型になり装置コストも場所もお金がかかり且つ、ブラスト処理に肝心な表面粗さ(表面粗度、鋭角でフラクタルでなければならない)が得にくいため、次工程の塗料などの密着度が得にくい。簡単に要約すると再ブラスト処理が必要な場合がある。
その、腑に落ちない原点の全てが「人」であった。他の業界でもいえる事であろうが、差ブラストノズルを持つのは「人」でなくてもいいのではないか?シーケンスプログラムを考えるのは「人」でなくてもいいのではないか?多軸ロボットのアームとホースの捻じれによる逆転のプログラムを考えるのも、ブラスト処理のパターン計画を考えるのも「人」でなくてもいいのではないか?上記について考えるのも面倒臭くなって諦めて、忘れていたところに、このアルファ1ブラストロボットが現れたために我々、関東アスコンに新しい仕事ができた。完全に違う仕事なのだが、今までのブラストの経験の蓄積が役に立つのでようやく光が差した。
2018年9月8日土曜日
アルファ1ブラストロボット 計画方法 4
ブラストパーンの選択ができる。
従来の人によるブラストの場合、ブラストパターンやブラストの処理履歴が残せないため処理後の表面粗さが安定しない。アルファ1ブラストロボットの場合、処理の再現性を含めて数値で残せるため、ISO8501-1の処理の数値制御が可能となる。
2018年9月2日日曜日
アルファ1ブラストロボット 計画方法 3
H鋼でのシュミレーションテスト
廃材のH鋼を使う




廃材のH鋼を使う




下記は全画面でご覧ください。
計画中、
ブラストが規定値通りの場合はストリームが白で表示されます。
ブラストが規定値より弱く当たるところはストリームが黄色で注意表示してます。
ブラストが規定値を逸れた場合や淵や縁で影の場合はストリームが赤で表示されます。
移動中ストリームがオフの場合、色はなしです。
登録:
投稿 (Atom)
厚地鉄工㈱関東アスコン 〒102-0073東京都千代田区九段北1丁目7番3号九段岡澤ビル3階 TEL:03-6261-6530 FAX:03-3221-6833

国際規格のブラスト工法